(定数は当社の場合の数値です)
寸法表は
こちらを御参照ください。


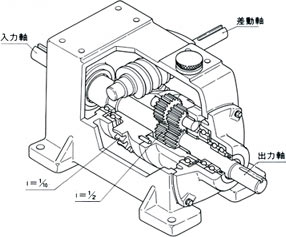
- 差動軸を固定して、入力軸を1回転させた場合出力軸は1/2回転します。
-
| 出力軸回転数= |
入力軸回転数 |
+ |
差動軸回転数 |
| 2 |
20 |
N1=1
N3=0
- 入力軸を固定して、差動軸を1回転させた場合出力軸は1/20回転します。
-
| 出力軸回転数= |
入力軸回転数 |
+ |
差動軸回転数 |
| 2 |
20 |
N1=0
N3=1
- 差動軸と入力軸を同時に回転させた場合
a. 入力軸と差動ギヤーが同方向に1回転した場合。
-
| 出力軸回転数= |
入力軸回転数 |
± |
出力軸回転数 |
| 2 |
20 |
N1=1
N3=1
b. 入力軸と差動ギヤーが逆方向に1回転した場合。
-
| 出力軸回転数= |
入力軸回転数 |
− |
差動軸回転数 |
| 2 |
20 |
N1=1
N3=1
以上の基本的3種類の運転を組み合せる事により、いろいろの回転を御発想下さい。
フィドバックの自動制御にも活躍しています。
AM-DF型
■基本運転(微少変速式)
動力用入力軸を一定にして、差動軸への入力回転数を変化させる事により、出力軸の回転数を4〜5%の微少変速を確実にできます。
AM-CT型
■基本運転
差動軸への入力回転を固定(停止)しておき、動力用の入力軸回転数を変化する事により、希望の出力軸回転数を得る事ができます。 積算されていく出力軸の誤差を、停止している差動軸を回転する事により誤差の修正をする事ができます。
AM型
■基本運転
CT-W型の差動歯車を利用し、差動軸への入力回転数を一定にして、動力用の入力軸の回転数を変化する事により、0〜160rpm位いの出力軸回転数を得る事ができます。
| 計算式N2= |
N1(変数) |
± |
N3(一定) |
| 2 |
20 |
0回転近くで最大トルクを発生します。










 ページトップ
ページトップ